
20、车载卫星/惯性紧密组合导航技术
时间:2021-11-23
点击数量:
一、成果简介
在城市峡谷、高架等导航卫星多径效应严重,以及隧道、地下停车场等导航卫星不可用环境中,GPS/北斗等卫星导航系统无法连续提供高精度定位服务。激光雷达、视觉、伪卫星、高性能惯导可在无卫导条件下连续提供导航定位,但其设备成本昂贵,对于民用车辆无法普及。MEMS惯导的尺寸、重量和成本都比较低,满足民用车辆对于成本控制的要求,但其误差漂移较为严重,无法长时间独立工作。因此,卫星/惯导组合应用与民用车载导航的最大困难在于低成本与高性能之间的矛盾。
车载卫星/惯性紧密组合导航技术将导航卫星的伪距、伪距率等原始观测数据与MEMS惯导进行组合,在导航卫星可用条件下连续提供位置、速度、姿态信息。为解决无卫星环境中的漂移问题,项目攻克车辆运动状态识别、运动学约束、IMU安装校正、传感器时间/空间不同步、里程计辅助、滤波器稳定优化设计等多项关键技术,最大限度发挥传感器、运动学有效信息,实现无导航卫星条件下的连续精确定位。如图1所示,任意安装条件下,使用工业级传感器,在重庆岚峰隧道(965米)实现1.53%/D自主导航精度;使用智能手机内置消费级传感器,在地下停车场(里程798m,时长152s,包含16次转弯)实现亚米级定位精度。
当前新能源+智能驾驶汽车处于爆发时增长时期,智能驾驶成为新能源车辆竞争的突破口和主战场。截止2021年11月,我国新能源汽车在汽车销量中的占比已超过11%,国务院碳达峰行动方案提出到2030年,新能源、清洁能源动力的交通工具比例达到40%左右。车载卫星/惯性紧密组合导航技术可应用于室内外无缝定位、智能驾驶等领域,市场前景在百亿元量级。
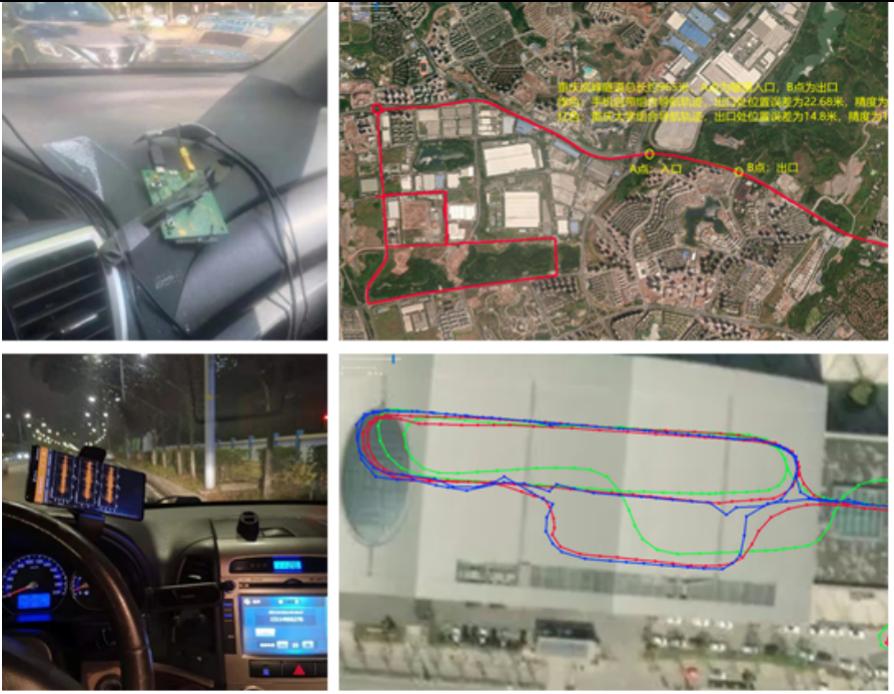
图1 实验场景及轨迹
二、视频展示
讲解人:黎蕾蕾
